SMSL Basic Toolkit
RTMaps 4を用いたリアルタイムシステム開発において、主にGNSS信号や地図情報を扱ううえで頻繁に使用される機能をパッケージ化しています。
信号生成からセンサードライバまで、開発工数を削減する基本コンポーネント群を提供します。
Basic Toolkitは無償IPとして公開しています。
ダウンロードリンク
Version 1.0
コンポーネントリスト
Generators(信号生成)
- Sine-Cosine Generator
振幅、位相、DCオフセットを動的に調整可能な2相信号。 - Gaussian Noise Generator
共分散とサンプルレートを指定可能なガウス性ノイズ。 - Static Image Generator
描画テストや背景画像として利用可能な静止画生成。
GNSS & Geography(位置情報)
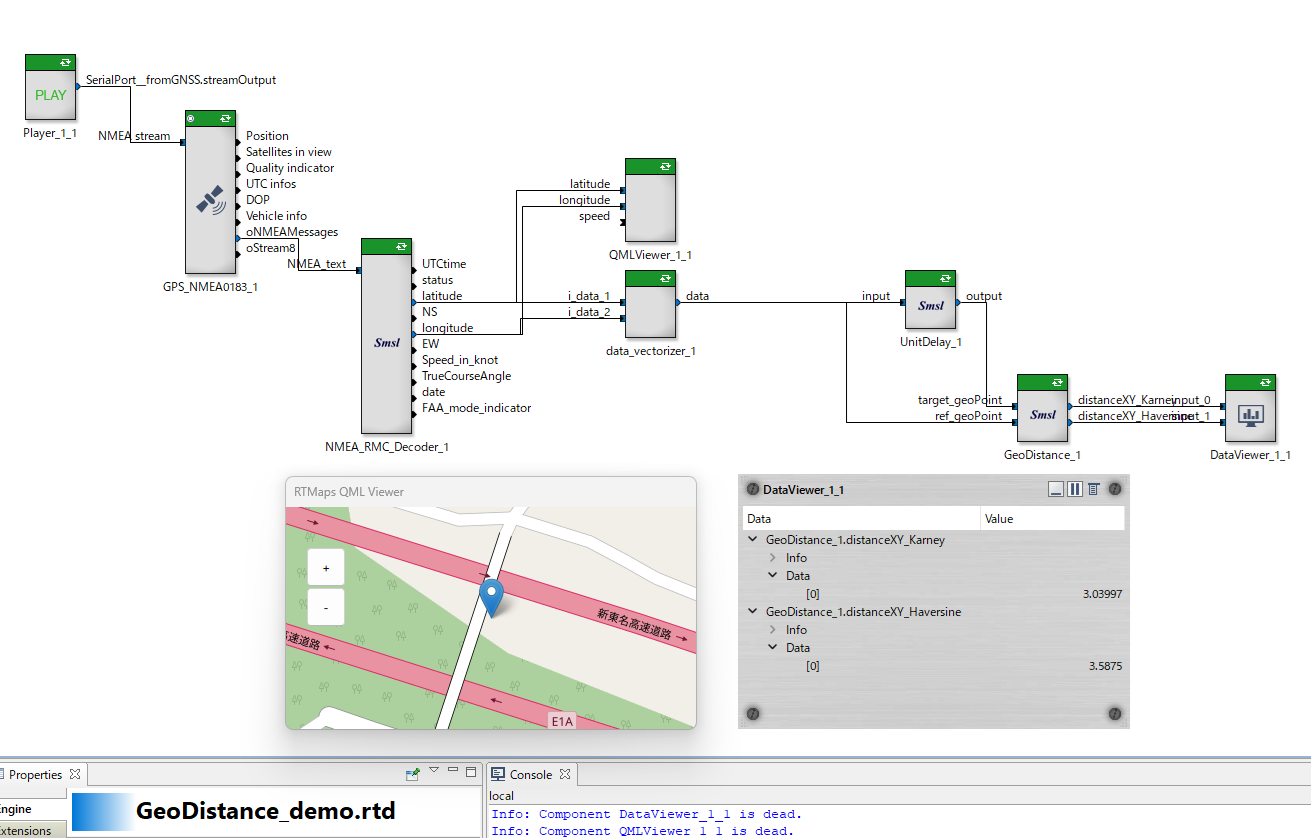
- GeoDistance
Karney法(高精度)およびHaversine法(高速)による距離計算。 - NMEA Decoder
GNS、RMCセンテンスのより詳細なデコードをサポート。
Sensor Drivers(ドライバ)
- YDLidar X2 Driver
低コスト2D Lidarの制御およびスキャンデータの取得。 - WitMotion WT901B Driver
高精度IMUの姿勢角、加速度、角速度データのデコード。
Signal Processing(信号処理)
- UnitDelay
指定サンプル数(N)の信号遅延処理。 - Max/Min/Mean
ベクトル信号および複数入力に対する最大・最小・平均値算出。 - NumericalTextWriter
数値データに対するhex/binフォーマットのcsvファイル出力。
ソフトウェア仕様
| パッケージ名 | SMSL_BasicToolkit.pck |
|---|---|
| バージョン | 1.0 |
| 対応OS | Windows 10/11 (64bit) / Ubuntu 24.04 LTS (64bit) |
| 対応RTMapsバージョン | RTMaps 4.9.2 以降 |
| 提供物 | パッケージ本体(.pck)、ユーザーマニュアル(PDF)、サンプルダイヤグラム(.rtd) |
デモ機能
本パッケージには、導入後すぐに動作を確認できる以下のデモが同梱されています。
- DSB_AM_demo: 二つのサイン波を用いたAM変調のシミュレーション例。
- Lidar_demo: YDLidar X2を用いた周囲環境の可視化例。
- WT901B_demo: WitMotion製IMUのリアルタイム姿勢取得例。
更新履歴
- 2026 3/31: NumericalTextWriterを追加ました。
- 2026 3/14: 初版公開